Significant performance improvements can be realized over conventional multicopters using TVP Propulsors in place of propellers, and in cooperation with them. The combination offers six degree-of-freedom (6DOF) control of the platform and redundancy with smaller or co-axial motors.
With 6DOF control, pitch, roll, and yaw, as well as altitude, forward, and lateral translation can all be controlled independently. Standard multicopters only possess 4DOF control as pitch is linked to fore and aft translation, and roll to lateral translation, meaning they cannot hold both position and attitude. A symmetric configuration, with arms at 90° to each other provides the simplest control laws for 6DOF control.
What are the applications?
Large multicopters with this type of agility and redundancy will be ideal aerial construction bots to erect or maintain bridges and buildings or hosting large sensors or counter-UAV (cUAS) payloads for perimeter protection.
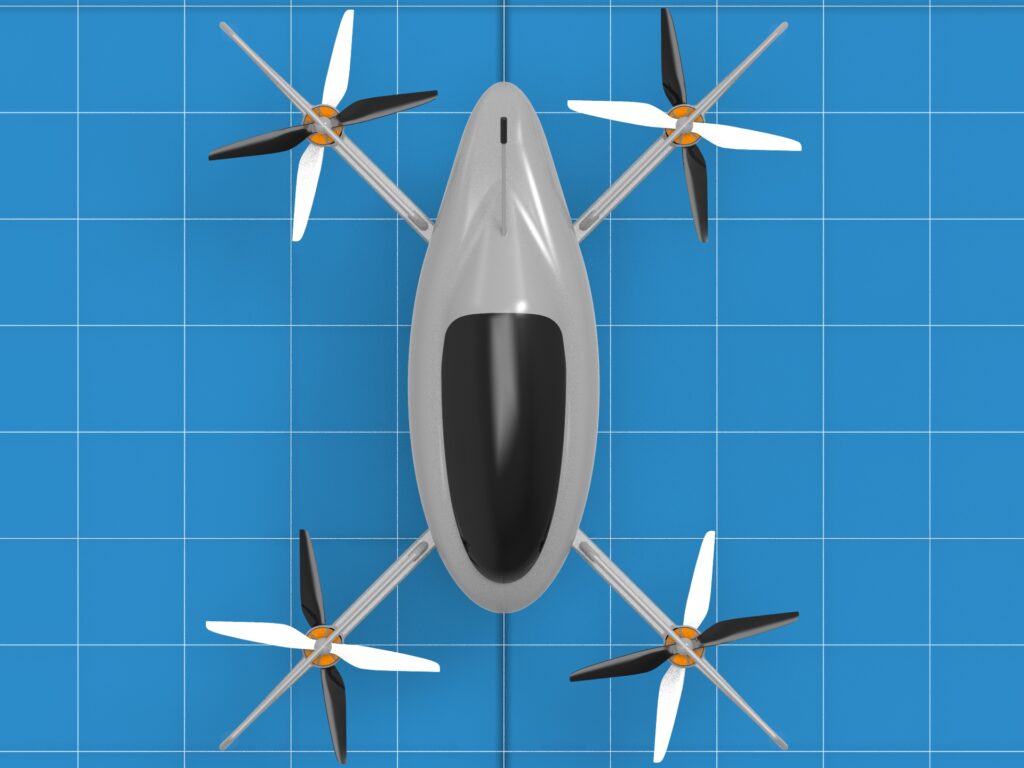
TVP Propulsors mounted above the arm distribute control forces through the Propulsors’ two interface pins outboard of the propellers. The control scheme allows lateral translation in any attitude and direction regardless of heading.
The lack of coupling with 6DOF control provides incredible agility. It allows controlled flight in adverse environments and safe landings on a hill or rolling ship deck. It saves the weight and complexity of a gimbal that would otherwise be required to maintain a payload’s pointing while compensating for the attitude of the vehicle.
The TVP Propulsors for lift applications are designed to tilt +/- 10°. By contrast, only +/-2° is required to provide the same control authority as varying motor torque by +/-40% using conventional control laws. The additional vectoring capability up to 10° is an enabler for translation with speed and gust alleviation.
TVP Propulsors can be mounted above or below the arm. In most multicopter configurations, it’s more efficient for the propellers to be mounted above the arm, rather than below. The same is true for TVP Propulsors. Studies have shown the difference in the total thrust produced with undermounted propellers can be 15% lower than a vehicle with overmounted propellers.
The vectoring capability of the TVP Propulsors is unaffected by motor selection. No loads go through the motors and mounts except torque. All the motors remain fixed to the arm, and the support arm is fixed to the airframe as is typical with a standard multicopter.
As is standard for large or manned multicopters, redundancy can be achieved with a second set of co-axial propellers. In this configuration, TVP Propulsors can replace one set of propellers, with all else remaining the same.
In operation, the TVP Propulsors provide 6DOF vehicle control, and the lower propellers provide redundant thrust. All motors can be reduced in size using TVP vectoring for control, rather than differential torque. The lower propeller and TVP Propulsor could even be driven by a single counter-rotating electric motor, (sometimes referred to as a coaxial motor) which potentially offers advantages in efficiency and power output, without affecting the control architecture.
Regardless of the motors selected, the differential thrust used to affect pitch and roll rotations can be generated with any combination of the lift motors. Ideally, all motors are employed for differential thrust as this will further reduce the motor size and allow the same motor in all locations.
In the event of motor failure in the lower set, the upper motor makes up for the loss, without any change to the vehicle’s control authority. In the event of an upper motor failure, the lower motor compensates for the lost thrust, and 6DOF control of the vehicle is maintained, but the control authority is reduced.
The lift forces into the arm are distributed at three locations – two for the TVP Propulsor, and one at the center through the lower motor and motor-mount of the conventional propeller.
It begins with a conversation