Hybrid VTOL configurations combine fixed-wing efficiency with VTOL capability, enabling operations without launch and recovery infrastructure (catapults, runways, or nets). While adaptable to almost any fixed-wing UAV, the lift system – which is essentially a multicopter, retains the limitations of multicopter drones. This study examines improving the control authority and capabilities of the Hybrid VTOL using thrust vectoring propulsors (TVP).
The study vehicle employs a typical four-lift-plus-one propeller configuration. Per convention, it operates in three modes: VTOL, transition, and fixed-wing flight. Typical VTOL mode employs a 4-DOF (degrees of freedom) control system similar to multicopters, using differential thrust and motor torque for coupled attitude and position control.
During transition – the most energy-intensive phase, the system maintains multicopter control while the propulsion propeller generates forward velocity until sufficient wing lift and control surface effectiveness is achieved. The lift propellers then park for fixed-wing flight.
Propulsor tilting controls yaw rate, differential thrust maintains attitude. The second slower animated loop depicts propeller pair tilt directions for clockwise yaw.
The use of differential motor torque for yaw control in multicopter systems presents inherent inefficiencies and operational limitations. The method necessitates non-optimal motor speed operation, resulting in increased power consumption during both yaw maneuvers and position maintenance. Control authority exhibits significant variation with motor speed, leading to degraded effectiveness at low throttle settings and a susceptibility to wind disturbances. Additionally, the inherent latency in motor speed changes – particularly with larger diameter propellers, results in diminished responsiveness with available yaw torque frequently proving insufficient against external aerodynamic disturbances. These limitations collectively constrain the aircraft’s yaw agility due to the non-optimal balance between lift generation and yaw control demands.
Thrust vectoring offers an alternative approach by implementing coordinated tilt control of the lift propellers. This method provides enhanced yaw authority while maintaining optimal motor speeds for efficiency. Implementation requires an additional servo for each propeller and modification of the flight control laws to transfer yaw control from the motor controllers to the propeller tilt mechanism – which is straightforward. The resulting system decouples yaw control from thrust generation, allowing each subsystem to operate in its optimal range.
The conventional approach to lateral control in Hybrid VTOL vehicles relies on differential thrust to induce vehicle tilt, which tilts the combined thrust vector and generates lateral force. The coupled nature of vehicle attitude and position introduces latency in the response of the vehicle and limits both performance and wind resistance. It results in increased power consumption and compromised stability – particularly with larger vehicles. These limitations impact operational capabilities and necessitate oversized propulsion systems.
Thrust vectoring addresses these limitations by tilting only the propellers, as opposed to the entire vehicle. The difference in the tilting inertia between the two approaches has a profound effect on the latency. This architecture enables direct lateral force generation while maintaining vertical thrust efficiency and level vehicle attitude – or any attitude desired. The decoupled, 5-DOF control scheme provides improved disturbance rejection without compromising lift efficiency. TVP integration for lateral control uses the same tilt servos added for yaw control and modifies the control laws to effectively utilize the additional degree of freedom. The result enables precision take-offs and landings in challenging environmental conditions.
Tilting the propulsors controls lateral position and speed. Only the propeller and protection beam tilt – the motors remain fixed. Differential thrust is used to maintain attitude.
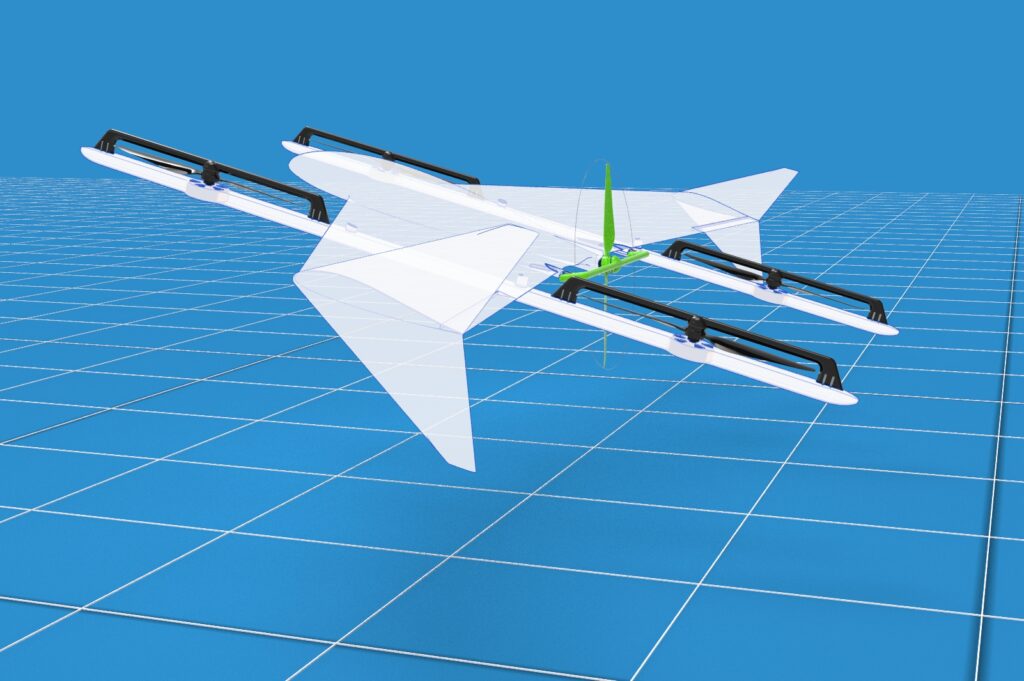
Rendering: The thrust vector of the pusher propeller (green) is tilted below the vehicle CG, raising the nose in pitch at rates greater than control surfaces at any velocity.
The integration of TVP for the propulsion propeller offers significant advantages in transition and the fixed wing flight modes. During transition, it provides direct compensation for the natural aerodynamic center shift forward of lift propellers while providing pitch control authority in the low-speed regime where traditional control surfaces are least effective. This capability enables stable and more rapid transitions in the most energy intensive mode of flight.
The added pitch authority compensates for the increased longitudinal inertia of the Hybrid VTOL’s lift booms. The vectoring propeller also enables real-time compensation for center of gravity changes from fuel burn, offloading payloads, or asymmetric loading conditions, reducing trim drag and improving overall energy efficiency. The enhanced pitch authority provides evasive maneuverability in contested environments.
It begins with a conversation